읽기 전에, VISR과 APT를 읽고 오시길 바라겠습니다.
Abstract
- 이 논문도 역시 Mutual Information을 maximize하여 Unsupervised Pre-training을 진행하는데, VISR과 APT의 기법을 잘 섞어 단점들을 보완한 Algorithm, Active Pretraining With Successor Feature(APT) 를 소개합니다.
Introduction
- 다른 computer vision, natural language processing 모두 pre-trained model을 통해 큰 진전을 이루었지만, RL은 아직도 scratch로부터 학습하는 것이 dominant합니다. 이는 RL algorithm이 새로운 task를 학습시킬 때 마다, scratch로부터 학습시켜야한다는 의미와 같은데, 이는 지능이 있는 생물의 특성과는 큰 대조를 이룹니다.
- 이 차이를 메꾸기 위해 unsupervised pretraining RL이 최근 많이 연구되고 있고, 이는 environment의 reward 없이 pretraining을 시킨 상태에서, downstream task를 통해 extrinsic reward를 받으며 얼마나 잘 pretrain되었는지 data efficiency등을 확인하는 과정으로 이루어집니다.
- SOTA unsupervised RL methods는 intrinsic reward를 이용하는 방법인데, 이는 extrinsic reward 없이 intrinsic reward만을 maximizing하여 의미있는 behavior를 만들어내는 방법입니다. 이는 VISR과 APT 두 가지 큰 흐름이 있는데, 이는 모두 장단점을 가지고 있습니다.
Related Work
Preliminaries
- Successor Features
Method
- Variational Intrinsic Successor Features(VISR)
- Unsupervised Active Pretraining(APT)
- Empirical Evidence of the Limitations of Existing Models
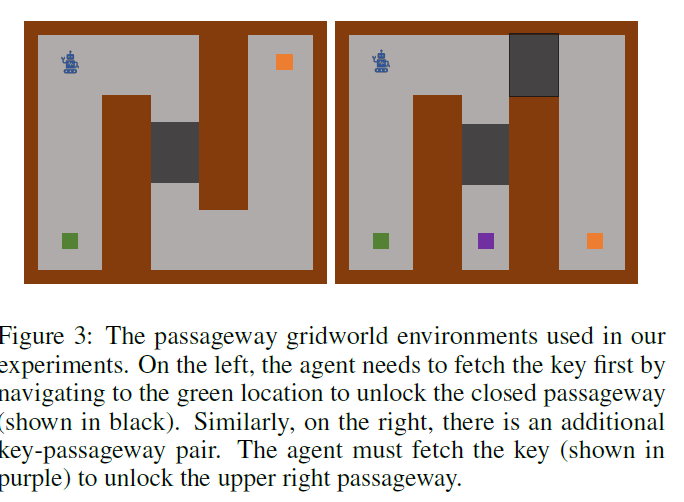
이 실험을 통해 VISR과 APT 두 방법의 한계를 보겠습니다. 이 실험은 좌측 상단의 로봇이 주황 지점까지 이동하는 실험입니다. 이 때, 초록색과 보라색을 누르면 막힌 길이 하나씩 열리게 됩니다. 좌측 실험은 우측 실험에 비해 열 길이 하나 적어 쉬운 task라고 할 수 있는데, 이 때 evaluation을 할 땐 초록색과 보라색의 key를 주우면 reward +1, 해결하면 +10을 주어서 테스트하였습니다. 이 실험에서 알 수 있는 점을 아래 figure를 보면서 확인하겠습니다.
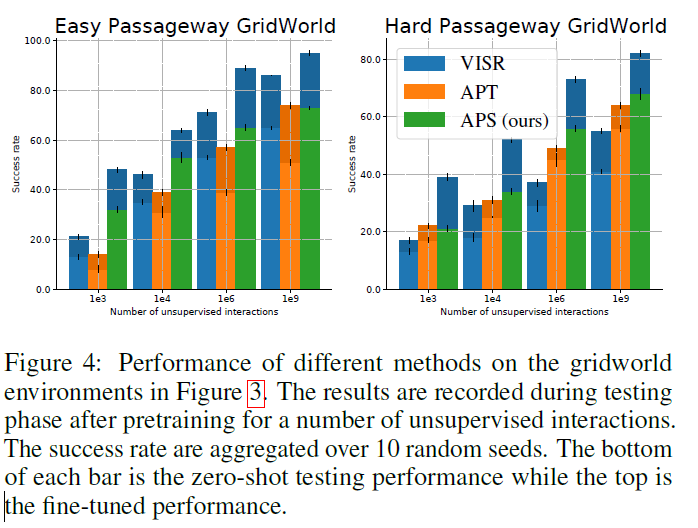
좌측 쉬운 task에 대해서는 VISR가 APT보다 좋은 성능을 보였지만, 어려운 task에 대해서는 APT가 VISR보다 좋은 성능을 보였습니다. 이는 VISR가 쉬운 task에서는 successor features를 downstream reward에 빠르게 적용할 수 있었다고 볼 수 있지만 어려운 task에서는 exploration이 잘 안되어 성능이 떨어졌다고 볼 수 있습니다.
- Active Pre-training with Successor Features
-
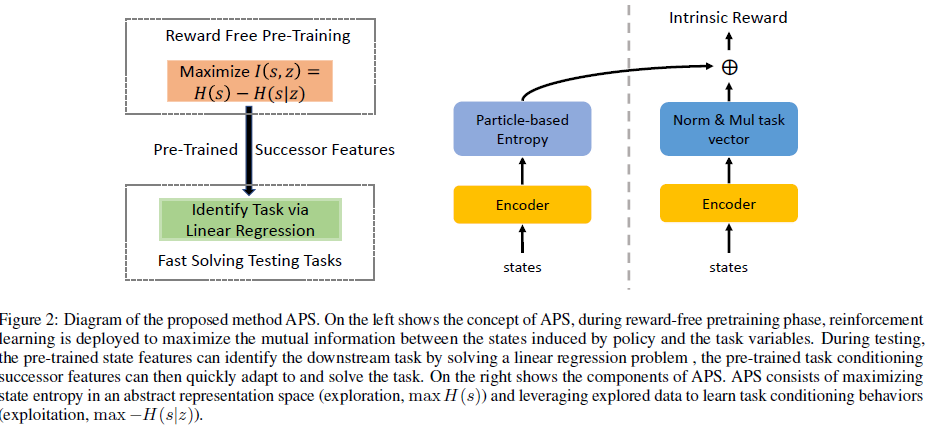
APT와 VISR 문제를 해결하기 위해 task variable z와 state에 대한 mutual information을 다음과 같이 나타냅니다.
\[I(z;s) = H(s) - H(s|z)\]\(H(s)\)는 agent가 exploration하도록 돕고, \(-H(s|z)\) 는 task variable에 의한 agent의 trajectories가 불확실성이 낮도록 돕습니다.
-
이 때 \(H(s)\)는 intractable하므로, APT에서 \(H(s)\)를 maximize하기 위해 주었던 reward를 그대로 사용합니다.
\[r^{\mathrm{exploration}}_{\mathrm{APS}}(s,a,s') = \log(1+\frac{1}{k}\sum_{h^{(j)}\in N_k(h)}||h - h^{(j)}||^{n_h}_{n_h})\] \[\mathrm{where}\ h = f_{\theta}(s')\cdots (2)\] -
\(H(s\vert z)\)는 VISR에서 \(H(z\vert s)\) minimizing할 때 썼던 variational approximation을 활용하는데, 이는 다음과 같습니다.
\[F = -H(s|z) \geq \mathbb{E}_{s,z}[\log q(s|z)]\]증명은 VISR에도 있지만, 여기서도 증명을 해주었습니다. 간단히 KL-divergence의 성질을 이용합니다. 그리고 \(w\)를 \(z \equiv w\)로 restricting하면 VISR에서 사용한 같은 reward를 얻을 수 있습니다.
\[r^{\mathrm{exploitation}}_{\mathrm{APS}} (s,a,s') = \log{q(s|w)} = \phi(s)^Tw \cdots(4)\]기존처럼, \(w\)와 \(\phi\)는 unit length를 지니고, \(q(s|w)\)는 scale parameter가 1인 Von Mises-Fisher distribution을 따르면 이 reward가 성립합니다. (이로 인해 VISR에서 자연스럽게 q의 VMF distribution에서 similar w 를 여러 개 뽑아 generalization하는 방법을 못써서 본문에서도 unit circle에서 뽑은 w를 하나 뽑아 쓰는 정도로 말합니다.)
이 때, encoder \(f\)와 \(\phi\)의 weights를 공유하는 것이 학습에 도움이 됨을 보았는데, encoder는 Von-Mises distribution \(q(s|w)\)의 negative log likelihood를 minimizing하여 학습시킵니다. \(L = -\mathbb{E}_{s,w}[\log{q(s|w)}] = - \mathbb{E}_{s,w}[\phi(s_t)^Tw]\)
(2)와 (4)의 Equation을 합쳐 reward를 쓰면 다음과 같습니다.
\[r_\mathrm{APS}(s,a,s') = r^{\mathrm{exploitation}}_{\mathrm{APS}} (s,a,s') + r^{\mathrm{exploration}}_{\mathrm{APS}}(s,a,s')\] \[r_\mathrm{APS}(s,a,s') = \phi(s)^Tw +\log(1+\frac{1}{k}\sum_{h^{(j)}\in N_k(h)}||h - h^{(j)}||^{n_h}_{n_h})\] \[\mathrm{where}\ h = \phi(s')\]\(\phi\)의 output layer는 l2 normalization을 해야하고, 아까 언급했던 것 처럼 task vector \(w\)는 unit circle위의 uniform distribution위에서 뽑습니다.
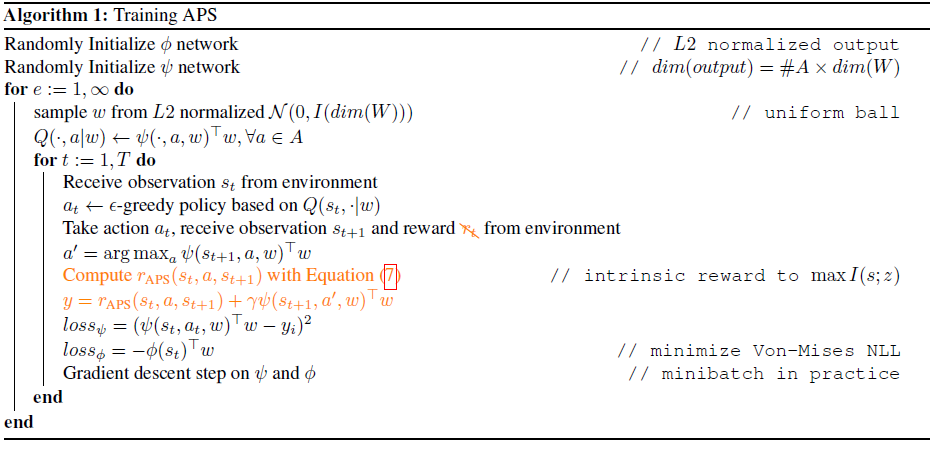
Algorithm and resulting model**
 이 때, 본문에서는 representation learning에 대해 깊게 다루지 않아 \(f\)가 algorithm상에는 생략되었습니다.
이 때, 본문에서는 representation learning에 대해 깊게 다루지 않아 \(f\)가 algorithm상에는 생략되었습니다.