Learning Combinatorial Optimization Algorithms over Graphs
Abstract
- graphical np-hard combinatorial problem에 초점을 맞추어 RL로 해결하는 논문입니다. 해결 범위는 structure가 고정된 채, 안의 data만 바뀌는 상황을 가정합니다. graph를 embedding하여(Structure2Vec) fitted q-learning를 통해 학습합니다.
Introduction
- Np-hard graph optimization problem을 해결하기 위한 접근법은 세 가지로 분류될 수있습니다.
- 첫 째로, 전역해를 구하는 것입니다. 이는 scale이 커지면 연산량 때문에 사용이 불가능할 수 있습니다.
- 둘 째로, 다항시간으로 근사한 해를 구하는 것입니다. 이는 optimality를 보증하기 어려울 수 있을 뿐더러 성능적 문제나 근사가 불가능할 수도 있습니다.
- 셋 째로, 휴리스틱한 알고리즘을 사용하는 것입니다. 이는 이론적인 배경이 부족하지만 빠르고 강력할 수 있습니다. 다만 이를 만들기 위해선 또 연구자의 큰 노력이 필요합니다.
- 기존에 Combinatorial problem을 해결하기 위한 연구들이 많이 존재하나, graph structure를 잘 반영하지 못했습니다. 또한, generalization을 위해 다양한 학습 set이 필요하고, on-policy로 인한 sample inefficiency를 겪습니다. pointer network를 통해 graph의 다양한 크기를 처리할 수 있는 것은 좋았으나, 이를 위한 추가적인 작업이 필요합니다.
- 본문에서는 RL과 graph embedding을 통해 이를 해결합니다.
- Algorithm design pattern
- agent는 greedy action을 취합니다.
- Algorithm representation
- representation을 배우기 위해 graph embedding network를 사용합니다. 이는 graph의 nodes와 정보에 대해 featurize합니다.(주변의 인접한 노드의 context를 반영해 특성을 얻어냅니다.) 이 또한 기존의 sequence-to-sequence방식과는 대비되지만 이 방식 또한 다양한 크기의 graph를 처리 가능합니다.
- Algorithm training
- fitted Q-learning을 통해 greedy policy를 학습합니다. 5.2에서 자세히 설명하겠습니다.
Common Formulation for Greedy Algorithms on Graphs
- 본문에서는 Mimum Vertex Cover(MVC)와 Maximum Cut(MAXCUT), Traveling Salesman Problem(TSP)에 적용함을 보입니다. 이 때 graph \(G\)에 대해 \(G(V,E,w)\)로 표현합니다. 이는 vertices와 edges, weights를 나타내며 graph는 undirected합니다.
- Minimum Vertex Cover(MVC)
- 그래프 G에 대해, 모든 edges를 포함하는 최소한의 nodes를 찾는 문제입니다.
- Maximum Cut(MAXCUT)
- 그래프 G에 대해, nodes를 두 set으로 나눌 때, 최대로 edge의 weights를 자르는 문제입니다.
- Traveling Salesman Problem(TSP)
- 평면의 그래프 G에 대해, 한 노드를 기점으로 모든 노드를 돌아 원점까지 돌아오는 최단거리를 구하는 문제입니다.
- Minimum Vertex Cover(MVC)
- 먼저 문제를 해결하는 방식은 evaluation function \(Q\)가 graph nodes를 greedy하게 하나씩 선택해 완성되지 않은 partial solution list \(S\)에 추가시키는 방식으로 학습됩니다. 이 문제들을 표현하기 위한 공통적인 formulation을 정의합니다.
- distribution \(\mathbb{D}\)로 부터 sampling된 하나의 graph problem \(G\)는 Vertices와 edges, weights로 이루어져있습니다.
- partial solution은 ordered list \(S= (v_1,v_2,...,v_{\vert S \vert})\)로 나타낼 수 있습니다. \(\bar{S}=V \backslash S\)는 \(S\)에 포함될 수 있는 candidates를 의미합니다. 이 때, \(S\)에 포함됐는지에 대한 여부 binary를 이용하는 vector \(x_v\)를 정의하는데 각 노드가 \(S\)에 포함되었을 때 1, 아닐 때 0으로 총 node와 같은 dimension을 가집니다.
- \(h(S)\)는 ordered list \(S\)를 다시 문제에 조건에 맞게 graph에 mapping하는 함수입니다.
- objective function \(c\)는 주어진 partial solution \(S\)의 graph에 대해 문제 \(G\)에서의 quality를 측정합니다. 이는 다음과 같이 나타냅니다. \(c(h(S),G)\)
- evaluation function \(Q\)를 maximize하는 \(v\)에 대해 partial solution \(S\)는 다음과 같이 확장됩니다. \(S := (S,v^*),\ \ \mathrm{where} \ v^* := \mathrm{argmax}_{v \in \bar{S}} Q(h(s),v)\) 이는 특정 termination criterion \(t(h(s))\)가 만족될 때까지 반복됩니다. 이를 이용해 MVC, MAXCUT, TSP를 어떻게 정의하는지 보입니다.
- MVC
- objective function은 \(c(h(s),G) = -\vert S \vert\)이고 \(t\)는 모든 edge가 포함되었는지 확인합니다.
- MAXCUT
-
위에서 표현한대로, 자른 edge들의 set cut-set은 edge의 한쪽은 \(S\)에, 다른한쪽은 \(\bar{S}\)에 존재하는데 이를 표현하면 다음과 같습니다.
\[C = \{(u,v) \vert (u,v) \in E, u \in S, v \in \bar S \}\]그리고 이를 objective function으로 표현하면 다음과 같습니다.
\[c(h(s),G) = \sum_{(u,v) \in C}w(u,v)\]
-
- TSP
-
objective function은 다음과 같고 \(S=V\)일 때 종료됩니다.
\[c(h(S),G) = -\sum^{\vert S \vert - 1}_{i=1}w(S(i),S(i+1)) - w(S(\vert S \vert),S(1))\]
-
Representation: Graph Embedding
- graph \(G\)를 optimizing하기 위해서 evaluation function \(\hat{Q}\)는 현재까지의 partial solution \(S\)에 대한 정보 \(x_v\)를 받아야하고, 이런 graph \(G\)에 대한 정보를 요약해 다음 node를 내놓아야합니다. 이 때 graph 상태와 node \(v\)에 대한 context를 같이 embedding하는 것은 굉장히 복잡한 일인데, 이를 해결하기 위해 graph를 사용한 structure structure2vec를 정의합니다.
- Structure2Vec
- 이 graph embedding network는 각 노드에 대한 p-dimensional feature embedding \(\mu_v\)를 생성합니다. 이는 아래와 같이 node가 neighbors와 recursive하게 연산하여 그래프의 특징과 long-range interaction을 표현하게 됩니다. 첫 \(\mu^{(0)}_v\)는 0으로 embedding 되지만, 다음과 같이 iterative하게 반복됩니다.
\(\mathcal{N}(v)\)는 graph \(G\)에서 노드 \(v\)에 인접한 노드 neighbors만을 이용하는 것에 유의하면 됩니다. \(F\)는 아래에서 자세히 정의하겠습니다.
- Parameterizing \(\hat{Q}(h(S),v;\Theta)\)
- \(F\)를 자세히 나타내면 다음과 같습니다.
이 연산을 통해 \(x_v\)는 처음엔 binary vector지만 recursive하게 연산되면서 다양한 정보가 통합되어 좀더 많은 의미를 가진 vector가 됩니다. (이전의 \(\mu_u\)에 대해 더많은 nonlinear layer를 거쳐도 된다고 합니다.) 이 연산을 \(T\)번 진행하여 얻은 각 node에 대한 embedding \(\mu^{(T)}_v\)를 가지고 마지막으로 다음과 같은 연산을 통해 \(\hat{Q}(h(s),v; \Theta)\)를 정의합니다.
\[\hat{Q}(h(S),v ;\Theta) = \theta^T_5 \mathrm{ReLU}([\theta_6\sum_{u \in V}\mu^{(T)}_u,\theta_7 \mu^{(T)}_v])\]trainable parameter \(\Theta\)는 \(\Theta = \{ \theta_i\}^7_{i=1}\)이고, \(T\)는 4번 정도로 사용을 했습니다. 마지막으로 이를 학습시킨 learning method를 보겠습니다.
Training : Q-learning
- Q-learning을 통해 학습하는데, nodes의 개수가 몇개든, max를 뽑는 연산을 하기 때문에 size가 dynamic함에 영향을 받지 않습니다.
- Reinforment learning formulation
- States
- state \(S\)는 graph \(G\)에서의 nodes입니다. 이전에 설명한 연산을 통해 p-dimensional space를 가지고 있습니다.
- Transition
- environment가 deterministic한 특성을 가지고 있습니다.
- Actions
- action \(v\)는 \(S\)에 있지않는 \(G\)의 node중 하나입니다.
- Rewards
-
reward function \(r(S,v)\)는 다음과 같이 계산할 수 있습니다.
\[r(s,v) = c(h(S'),G) - c(h(S),G) ,\ \ c(h(\emptyset),G)=0\]이 때 \(R(\hat{S}) = \sum^{\vert \hat{S} \vert}_{i=1} r(S_i,v_i)\)는 \(c(h(\hat{S}),G)\)와 같습니다.
-
- Policy
- \(\hat{Q}\)에 의해 determinstic greedy policy \(\pi(v \vert S) := \mathrm{argmax}_{v' \in \bar{S}}\hat{Q}(h(S),v')\)를 가집니다.
- Learning algorithm
- n-step Q-learning과 fitted Q-iteration을 통해 학습됩니다. 이는 다음의 algorithm 1과 같습니다.
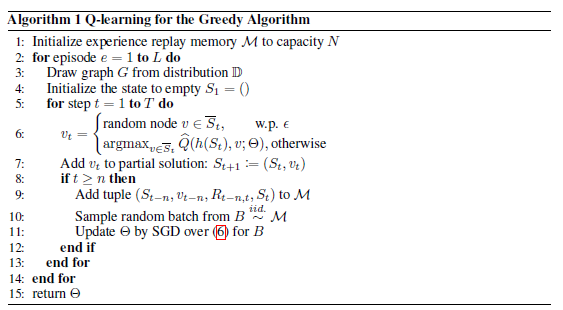
Q-learning에서 Q의 update는 target y와의 L2 loss를 minimize하여 update합니다.
\[(y - \hat{Q}(h(s_t),v_t; \Theta))^2\]이 때, trajectory가 길고 어려우므로 이를 보정하기 위해 n-step learning을 진행합니다.
\[y= \sum^{n-1}_{i=0}r(S_{t+i},v_{t+i}) + \gamma \max_{v'} \hat{Q}(h(S_{t+n}),v';\Theta)\]fitted Q-learning은 기존 Q-learning에서 online sample-by-sample으로 학습하는 것을 replaybuffer를 만들어 개선하였습니다.(이에 Neural Fitted Q learning이 존재하는데, 이는 environment를 표현할 충분한 data를 가진상태를 가정하고 replaybuffer에서 data만 뽑아학습하는 Q-learning과 같습니다.) 이때 Q를 표현하기 위해 neural network를 사용합니다. 당연한 얘기지만 이후의 논문에서도 S2V-DQN을 baseline으로 쓰므로 DQN처럼 구현해도 괜찮을 것 같습니다.